中方将成立中国—上海合作组织能源、绿色产业、数字经济三大合作平台,以及科技创新、高等教育、职业技术教育三大合作中心。
——2025年9月1日习近平在“上海合作组织+”会议上的讲话
中方将成立中国—上海合作组织能源、绿色产业、数字经济三大合作平台,以及科技创新、高等教育、职业技术教育三大合作中心。
——2025年9月1日习近平在“上海合作组织+”会议上的讲话
在进行大修作业过程中,修井作业装备最重要的工作是反复起下钻、排放立根、倒换吊卡操作液压钳上卸扣等,尤其在二层台操作中,工人需要反复开关吊卡,推拉钻柱,劳动强度较大且工作十分危险。为了解决上述矛盾,公司经过大量调研和试验,设计制造了可与多种型号的大修机配套使用的大修作业自动化系统,该系统2人即可完成起下立柱。系统主要由二层台机器人、二层台及拴阵指梁系统、铁钻工、动力猫道、自动吊卡及导向机构、液动卡盘、气动系统、液压系统、监控系统、控制系统等组成。


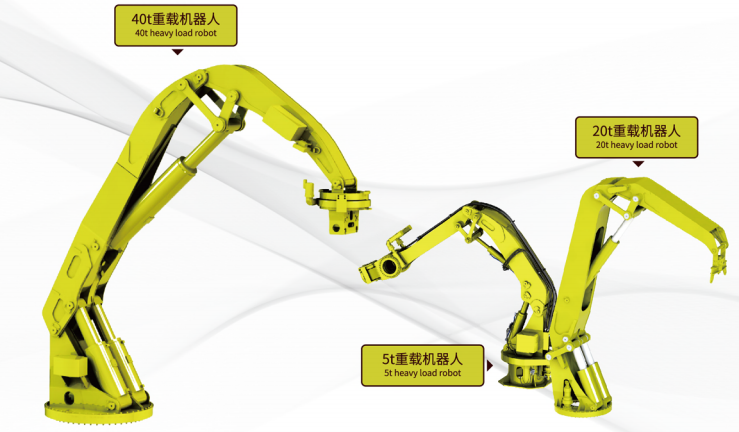
重载机器人依托公司拥有自主知识产权的野外车载重载机器人技术来实现,采用垂直多关节形式机器人结构,实现重载机器人高精度多轴复合运动,可满足不同规格负载吊装、转载、搬运等需求。系统采用先进的激光扫描、视觉识别等技术进行目标定位与识别;控制系统集成运动规划、位置伺服、数据采集处理等功能;液压系统采用比例双阀组控制模式,高效运转。相对于传统起重设备,重载机器人更加智能、高效、灵活。根据使用工况要求,该产品有单臂和双臂两种工作模式可供选择。
采用信息-能源深度融合的创新产品“能量路由器”作为现场集成的智能化设备,能够快速构建园区/社区级的区域能源互联网,相比传统的分散集成方式,该方案提高微网集成效率,降低微网集成成本约30%。
